
Improving GPS accuracy with RTK
Most of us use GPS regularly, even if we are not all aware that we are doing so. But should we be concerned about its accuracy? In this post we consider when and how to go about improving GPS accuracy.
Some Terminology
Global Positioning System or GPS – a satellite-based navigation system owned and maintained by the United States government.
Global Navigation Satellite System or GNSS – any system of satellites transmitting data to receivers used to determine location. One such system is GPS, which is a term often used interchangeably with GNSS.
Real-Time Kinematic Positioning or RTK – a method to remove some of the inaccuracies inherent in GNSS systems.
How does GPS work?
GPS in our cars and our smartphones has revolutionised the way we get from A to B. Yet we often hear about people ending up in the wrong place. However, this is an issue with the correctness of the map data they are using, not the positional accuracy of the system.
When driving in your car, it doesn’t matter if the GPS is out by a few metres. But in some use cases, the imprecision of GPS data can be problematic. Before we consider those, let’s remind ourselves how GPS works.
Each satellite in a GNSS transmits a unique signal picked up by your car, phone or some other type of GNSS receiver. When the receiver gets signals from enough satellites, it will use them to determine its whereabouts on the planet’s surface. This technique is known as trilateration, which is really well explained in the article How GPS Receivers Work on GIS Geography.
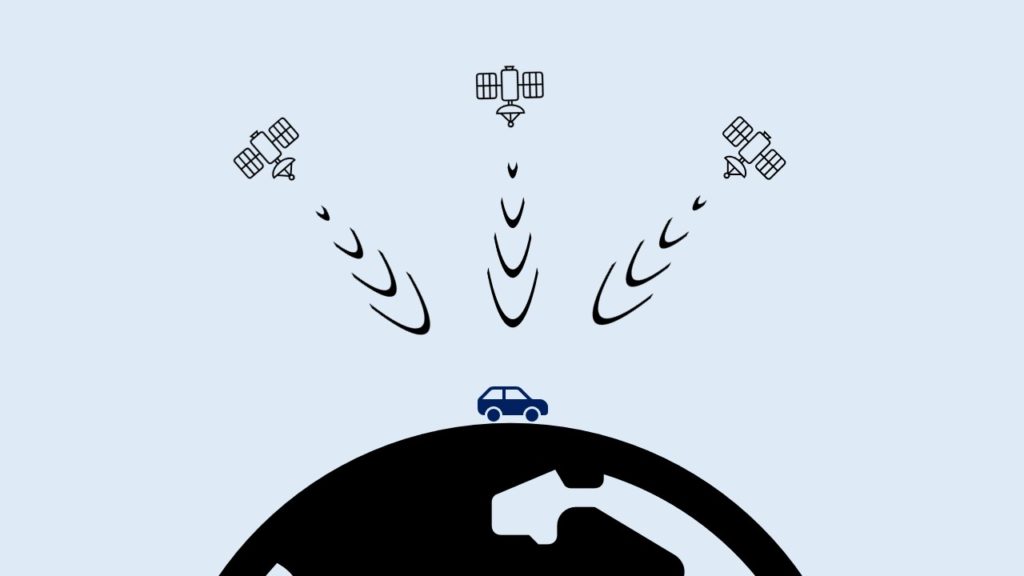
Over time, the satellites the receiver is seeing will change, as some go out of view and others appear. When we are in open, flat countryside the receiver will see more satellites than when blocked by buildings or natural features.
When is GPS not accurate enough?
As we mentioned earlier, for the majority of uses the accuracy of GNSS/GPS systems is good enough. If you want to see your current whereabouts on a digital map when out hiking or driving through town in your car, then out of the box GPS does a great job.
To give us a rough idea of accuracy, GPS.gov says that a GPS smartphone is typically accurate to within a 4.9m (16ft) radius. The quality of the GPS receiver, number of visible satelittes and atmospheric conditions all impact the accuracy of our receiver.
But what if that level of accuracy is not good enough? A farmer working in a field needs their tractor to go up and down in parallel lines, requiring centimetre accuracy. Similarly, when doing aerial or ground-based surveys we need high levels of accuracy.
Every photograph we take with a drone has its current coordinates and height above the ground written in to it. When reconstructing a scene using hundreds or thousands of such photos, the accuracy of this positional data is vital.
Improving GPS accuracy
The accuracy of our GPS data is improved by applying corrections that are aquired and applied either in real-time (RTK) or by post processing (PPK). Each has their own benefits and drawbacks, but here we’ll focus on RTK.
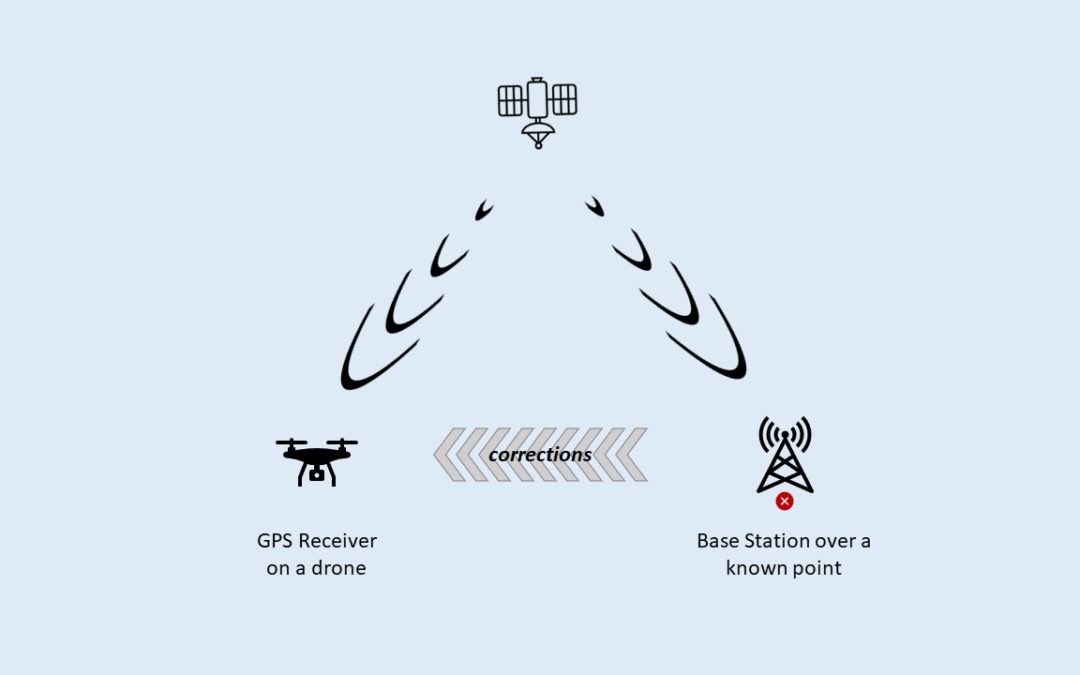
Real-time corrections must come from a base station located nearby, so they see the same set of satellites. By placing a base station over a known point it can calculate the degree of error in the GPS trilateration and so corrections can then be sent to other receivers.
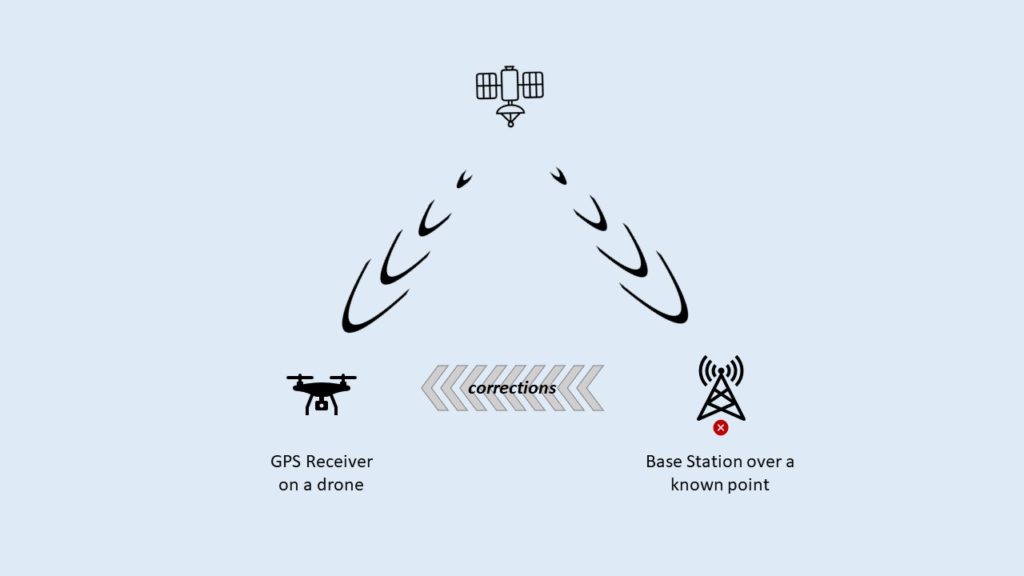
Once obtained, the receiver on board the drone or tractor applies these corrections to their own GPS calculations, improving the positional accuracy from metres down to centimetres.
Local vs Remote Base Stations
There are two options when it comes to base stations. Either setting up your own local base station over a known point, or connecting to someone elses over the Internet.
We’ll look at setting up a local base station first, as this is the simpler of the two options. You will need some additional equipment for this. At Fox Volant, we use an Emlid Reach RS2+, placed on a tripod over a known point. This point must either be calculated by the equipment or provided up front. Aside from the additional cost, one downside of a local base station is more equipment to carry about.
To use a third-party RTK corrections service requires access to the Internet. This is usually a paid service, although in some countires this is provided free by the state. The protocol used to transfer correction data over the Internet is called NTRIP. The article What is NTRIP? on the Anatum website gives a great overview of NTRIP.
The primary concern when using an NTRIP service is how close the remote base station is to where you are working. There are two reasons for this. Firstly, if they are too far away then you’ll be seeing different satellites, due to the curvature of the earth. The second reason is the difference in atmospheric conditions between locations. These can result in the wrong corrections being applied for your location.