Most of us use GPS regularly, even if we are not all aware that we are doing so. But should we be concerned about its accuracy? In this post we consider when and how to go about improving GPS accuracy.
Some Terminology
Global Positioning System or GPS – a satellite-based navigation system owned and maintained by the United States government.
Global Navigation Satellite System or GNSS – any system of satellites transmitting data to receivers used to determine location. One such system is GPS, which is a term often used interchangeably with GNSS.
Real-Time Kinematic Positioning or RTK – a method to remove some of the inaccuracies inherent in GNSS systems.
How does GPS work?
GPS in our cars and our smartphones has revolutionised the way we get from A to B. Yet we often hear about people ending up in the wrong place. However, this is an issue with the correctness of the map data they are using, not the positional accuracy of the system.
When driving in your car, it doesn’t matter if the GPS is out by a few metres. But in some use cases, the imprecision of GPS data can be problematic. Before we consider those, let’s remind ourselves how GPS works.
Each satellite in a GNSS transmits a unique signal picked up by your car, phone or some other type of GNSS receiver. When the receiver gets signals from enough satellites, it will use them to determine its whereabouts on the planet’s surface. This technique is known as trilateration, which is really well explained in the article How GPS Receivers Work on GIS Geography.
Over time, the satellites the receiver is seeing will change, as some go out of view and others appear. When we are in open, flat countryside the receiver will see more satellites than when blocked by buildings or natural features.
When is GPS not accurate enough?
As we mentioned earlier, for the majority of uses the accuracy of GNSS/GPS systems is good enough. If you want to see your current whereabouts on a digital map when out hiking or driving through town in your car, then out of the box GPS does a great job.
To give us a rough idea of accuracy, GPS.gov says that a GPS smartphone is typically accurate to within a 4.9m (16ft) radius. The quality of the GPS receiver, number of visible satelittes and atmospheric conditions all impact the accuracy of our receiver.
But what if that level of accuracy is not good enough? A farmer working in a field needs their tractor to go up and down in parallel lines, requiring centimetre accuracy. Similarly, when doing aerial or ground-based surveys we need high levels of accuracy.
Every photograph we take with a drone has its current coordinates and height above the ground written in to it. When reconstructing a scene using hundreds or thousands of such photos, the accuracy of this positional data is vital.
Improving GPS accuracy
The accuracy of our GPS data is improved by applying corrections that are aquired and applied either in real-time (RTK) or by post processing (PPK). Each has their own benefits and drawbacks, but here we’ll focus on RTK.
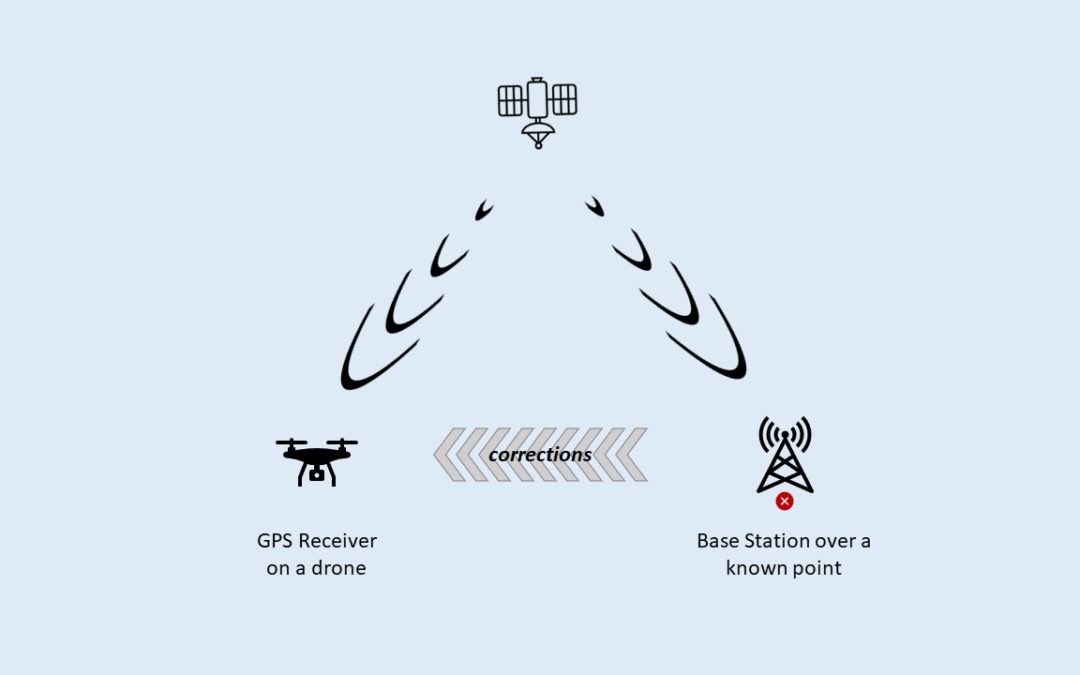
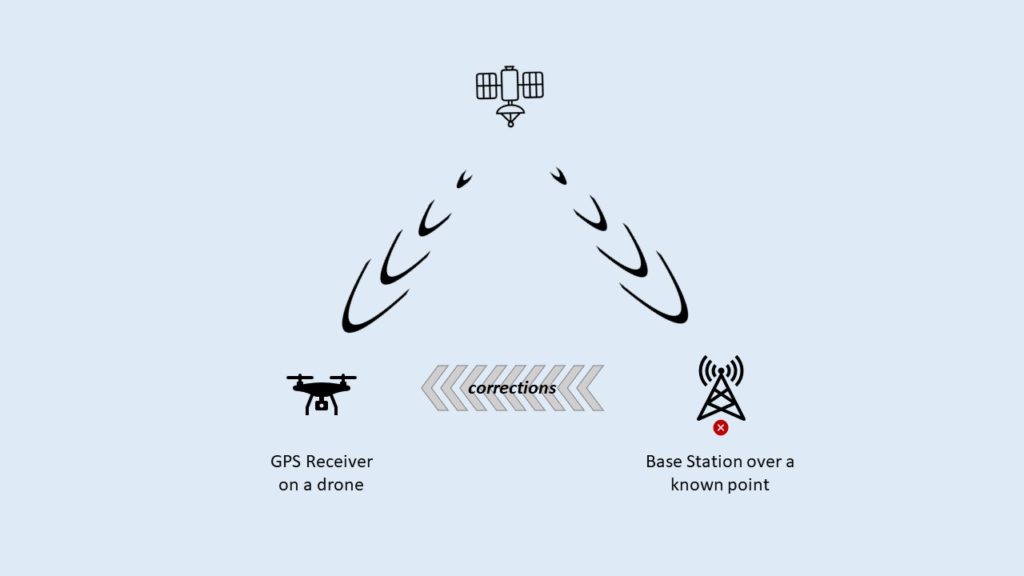
Real-time corrections must come from a base station located nearby, so they see the same set of satellites. By placing a base station over a known point it can calculate the degree of error in the GPS trilateration and so corrections can then be sent to other receivers.
Once obtained, the receiver on board the drone or tractor applies these corrections to their own GPS calculations, improving the positional accuracy from metres down to centimetres.
Local vs Remote Base Stations
There are two options when it comes to base stations. Either setting up your own local base station over a known point, or connecting to someone elses over the Internet.
We’ll look at setting up a local base station first, as this is the simpler of the two options. You will need some additional equipment for this. At Fox Volant, we use an Emlid Reach RS2+, placed on a tripod over a known point. This point must either be calculated by the equipment or provided up front. Aside from the additional cost, one downside of a local base station is more equipment to carry about.
To use a third-party RTK corrections service requires access to the Internet. This is usually a paid service, although in some countires this is provided free by the state. The protocol used to transfer correction data over the Internet is called NTRIP. The article What is NTRIP? on the Anatum website gives a great overview of NTRIP.
The primary concern when using an NTRIP service is how close the remote base station is to where you are working. There are two reasons for this. Firstly, if they are too far away then you’ll be seeing different satellites, due to the curvature of the earth. The second reason is the difference in atmospheric conditions between locations. These can result in the wrong corrections being applied for your location.
We are delighted to now be Gold Certified members of Drone Safe Register – the UK’s trusted network of trained, safe & insured professional drone pilots.
Who are Drone Safe Register?
Drone Safe Register (DSR) began in 2015, when owner and drone enthusiast, Mark Boyt saw a need in the UK drone industry. A platform where qualified drone pilots can come together to record the services they offer and how to contact them.
When individuals and businesses need remote aerial work undertaking, going to DSR ensures contact with safe, qualified pilots. Not only is DSR committed to providing a network of and for pilots, but also to educating the public. Helping to make them aware of the importance of hiring legal, qualified drone operators.
Why join Drone Safe Register?
The ‘Gold Certificate’ membership is currently the highest tier and requires operators to provide proof of Operational Authorisation from the CAA. Insurance cover to fly commercially, and pilot’s qualifications must also be provided.
These are all legal requirements to fly drones commercially in the UK. Unfortunately, either through lack of awareness of current regulations or willingness to disregard them, it is not always guaranteed that a pilot is legal, safe, or qualified to fly commercially.
At Fox Volant we take pride in the time, effort and training that has gone into achieving our Operational Authorisation. Having the opportunity to be showcased alongside other drone companies and pilots across the UK means a lot to us.
Finding a Drone Pilot
If you are looking for a drone pilot for your aerial photography, inspection or surveying needs we’d be delighted to help. But we’re confident that you can be assured any pilot you contact from DSR will also be safe and legal. Wherever in the UK you happen to be, DSR will help you find nearby pilots with the necessary skills and qualifications.
View our profile on Drone Safe Register for more information or use our contact form to get in touch.
We use the term orthomosaic on our website and in our posts, but what does it actually mean? In this post, we’ll try to explain in simple terms what an orthomosaic is, how we create them and what makes them so useful.
Why is an orthomosaic different from an aerial photo?
Let’s get started with the following image; a small section of an abandoned airfield.
It looks just like any other aerial photograph, doesn’t it? In fact, it’s an orthomosaic, computer-generated from hundreds of drone photographs, showing an area of about 6.5 acres. To capture a similar image with a single aerial photograph you’d probably need to fly above the legal maximum height for a drone (120m / 400 ft).
We begin with a process called orthorectification. This corrects the photographs that will make up the orthomosaic, converting them into orthophotos. The prefix ‘ortho’ means upright, straight, regular or true; so orthorectification is the term we use when geometrically correcting a photograph to be ‘true’.
Why do aerial photographs need to be corrected?
Imagine flying above where you live or work and trying to take a photograph straight down. Looking at the resulting photograph you might notice that the camera lens has introduced some distortion. Also, if it’s not pointing perfectly downwards you’ll also see a degree of tilt in the photograph. Orthorectification compensates for both.
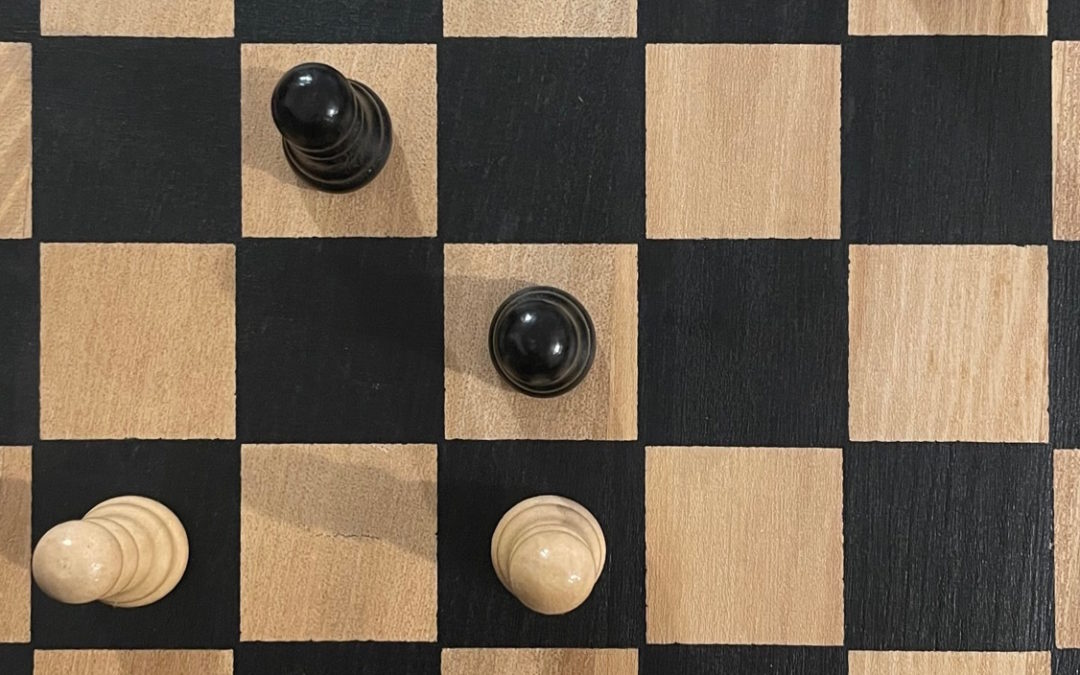
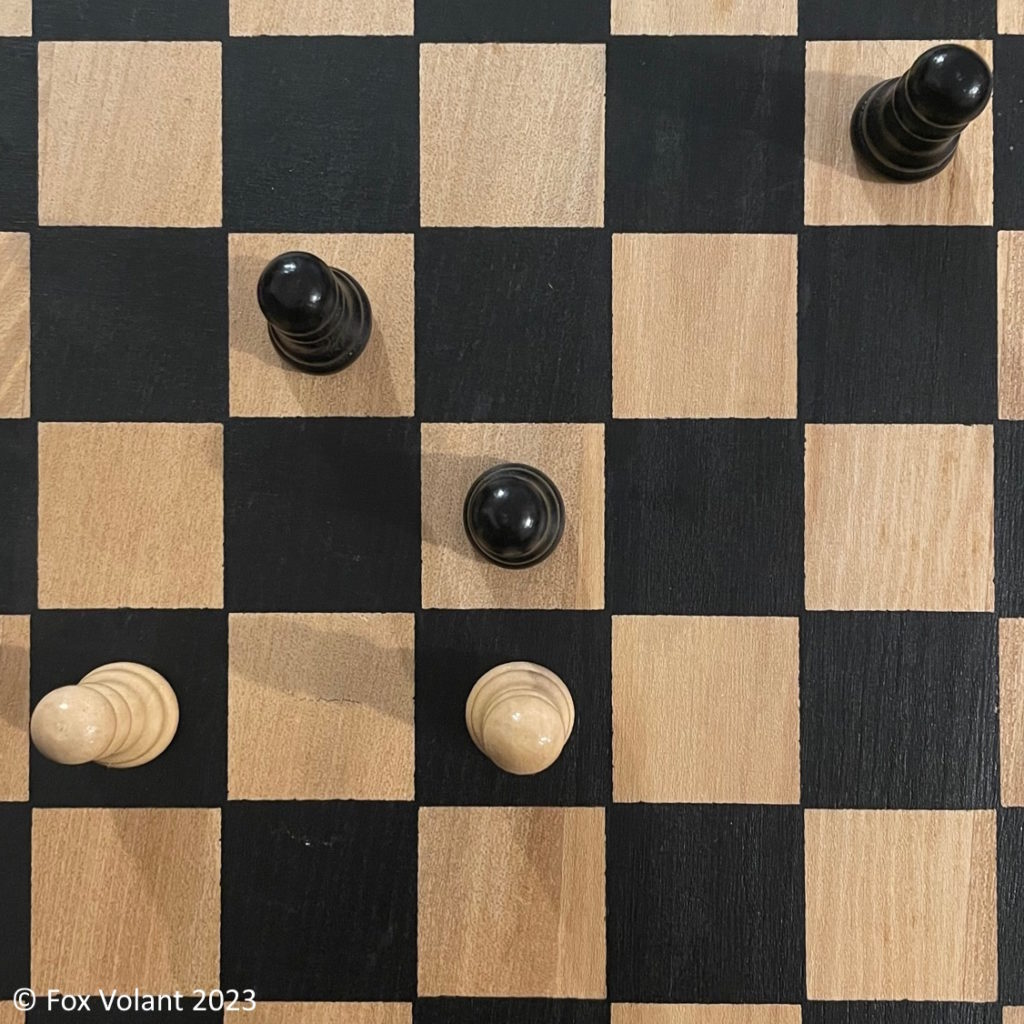
An example on a smaller scale
Look at the image of the chessboard shown below and you can see that both the top and base of the centre chess piece are clearly visible. As you move further away from the centre the pieces increasingly occlude themselves. In an orthorectified image, we would expect all the pieces to appear the same as the one in the centre.
How the orthomosaic process works
Photogrammetry software takes many overlapping images and calculates height data for all the points in our scene. The software then uses this data to create a Digital Surface Model (DSM), which represents the topography of the scene. We then use the DSM to orthorectify the photographs and join them together to make the orthomosaic.
The advantage of an orthomosaic
As we mentioned at the beginning of this post, using orthomosaics allows you to generate an image showing a very large area; in some cases covering tens or hundreds of acres in minutes with our drones. Without orthomosaics this would require using an aeroplane or even a satellite to take the photographs.
The other benefit of this process is accuracy. We can create maps of an area which contain precise measurements of the distances and angles of the topography. We can then have confidence that we’re putting up the building in the right spot, or placing the property boundary in the right location, for example.
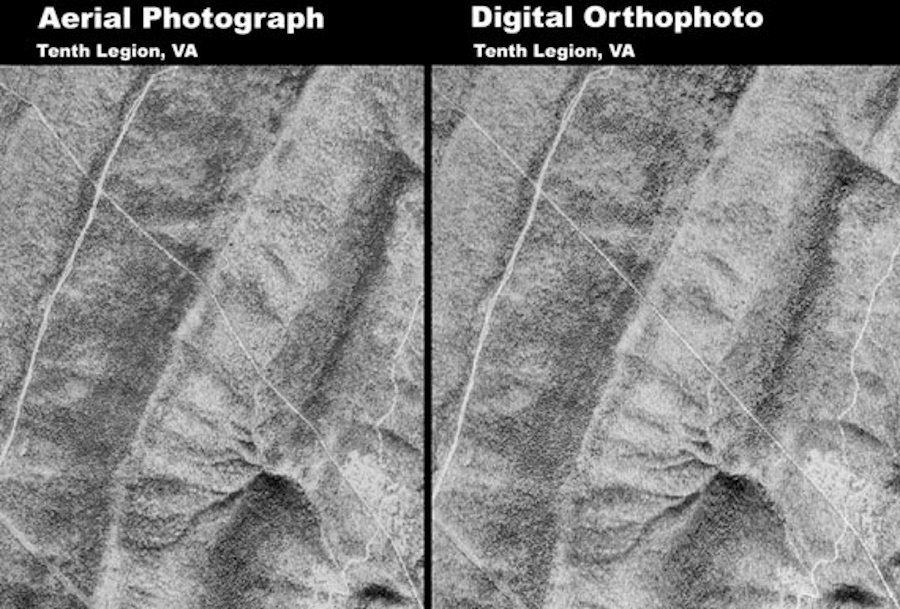
An example of orthorectification in action
The following image taken from the U.S. Geological Survey (USGS) is a great example of how orthorectification can show us more accurately what’s really happening on the ground. The two photos below show a pipeline running from top-left of each image to bottom-right. In the original aerial photograph on the left, the pipeline does not appear straight. A combination of camera tilting, lens distortion and ground topography conspired to show a distorted image. The orthorectified image on the right-hand side shows a more accurate representation of the straight pipeline.
Orthomosaics are immensely valuable tools in a whole variety of situations. Consider crop mapping with multispectral cameras, precise measurements of archaeological dig sites or progress charting of large civil engineering projects. If you have a project that could benefit from using orthomosaics then we’d love to hear from you. Call us on 01353 655762 or send an email to contact@foxvolant.com and we’d be happy to discuss your needs.
Our latest purchase arrived earlier this week, an Emlid Reach RS2+, bought from Heliguy here in the UK, which we will be using as our new RTK GNSS base station out in the field.
RTK stands for Real Time Kinematics. It is one mechanism available for increasing the accuracy of the GNSS (Global Navigation Satellite System) used by drones. The other mechanism is Post Processed Kinematic (PPK). Putting it simply, GNSS systems such as GPS just aren’t accurate enough on their own when doing aerial survey work. Hence, we need to correct them, either in real-time or after the event.
Why did we go for the RS2+?
It was a toss-up between that and the DJI D-RTK-2. Reading around comes up with favourable reviews for them both. The DJI has the obvious benefit of easy set-up and configuration when used with DJI’s RTK-equipped drones. However, the versatility of the RS2+ alongside the excellent documentation, support and community that Emlid have built up swung it in their favour.
How will we use it?
Initially, we’ll be using the RS2+ as a local NTRIP server on-site for our RTK-equipped drones. This will provide real-time positioning updates for greater accuracy. Looking to the future, we fully intend to make use of its extra features in the coming months, not least the onboard LoRa radio.
The only issue we had during setup was getting it to start up in hotspot mode. Luckily, we quickly realised why this was. The RS2+ was still connecting to our office WiFi network, even though we’d gone outside and away from the building! Once we got it to forget the network, everything worked perfectly.
We hope you found this post useful and we would love to hear about your experiences using the Reach RS2+ or other Emlid products. Follow our social media feeds for more UAV content. We’re always happy to chat about any projects you have coming up with no obligations. Give us a call on 01353 655762 or email us at contact@foxvolant.com